
Através deste projeto, buscamos desenvolver um dispositivo que faz um mapeamento do espaço, similar a um radar encontrado em barcos e aviões.


Detalhes do projeto
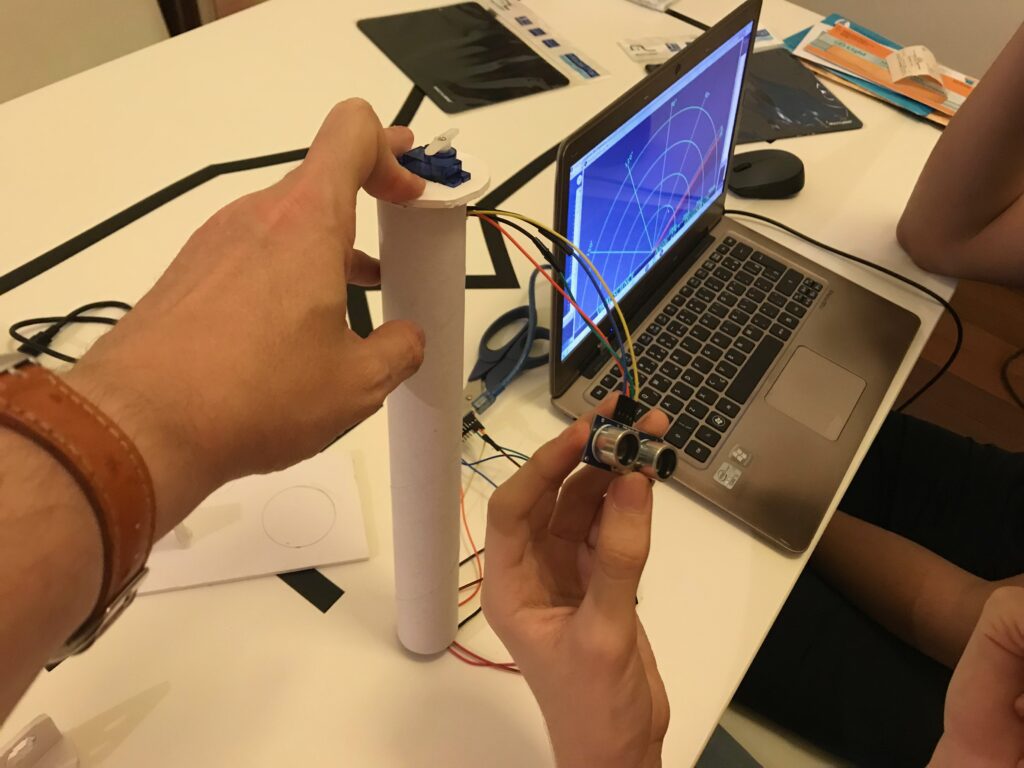
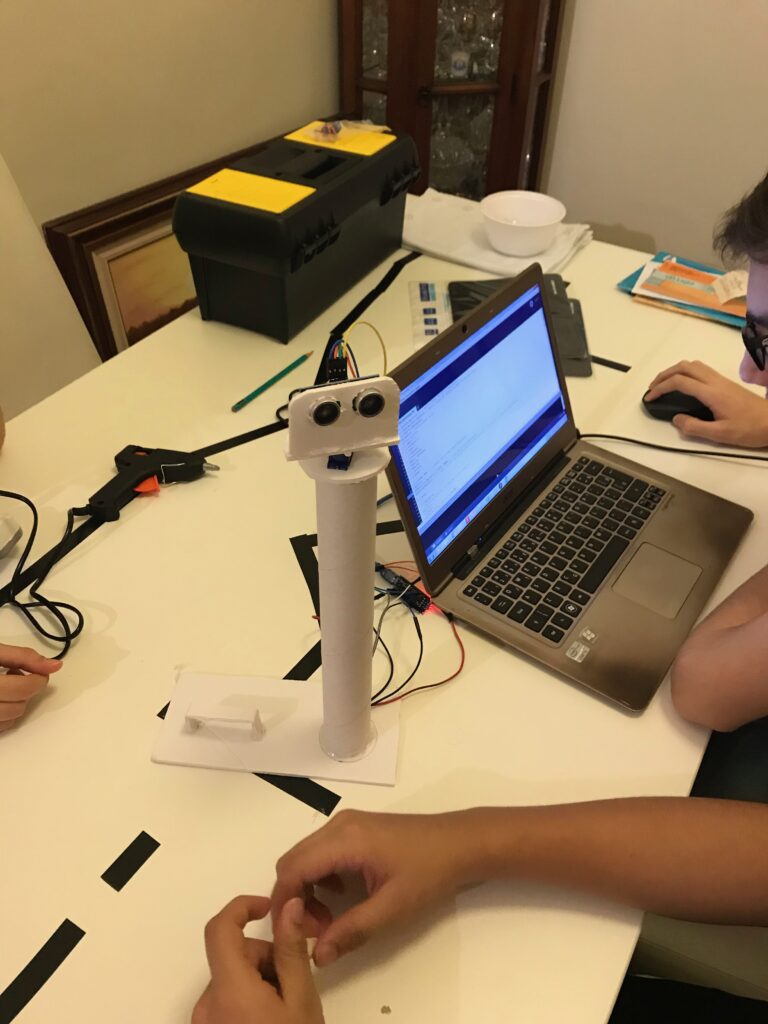
Para fazer a varredura do espaço, utilizamos um sensor de distância ultrassônico, que funciona enviando um sinal sonoro e ouvindo seu retorno. Conhecidos a velocidade do som e o tempo entre o envio e o recebimento, é possível calcular a distância do objeto. Além disso, é utilizado um servo motor com ângulo de rotação de 180º para girar o sensor e obter uma imagem mais ampla do espaço. Toda a movimentação e cálculo de distância são feitas com Arduino Nano.
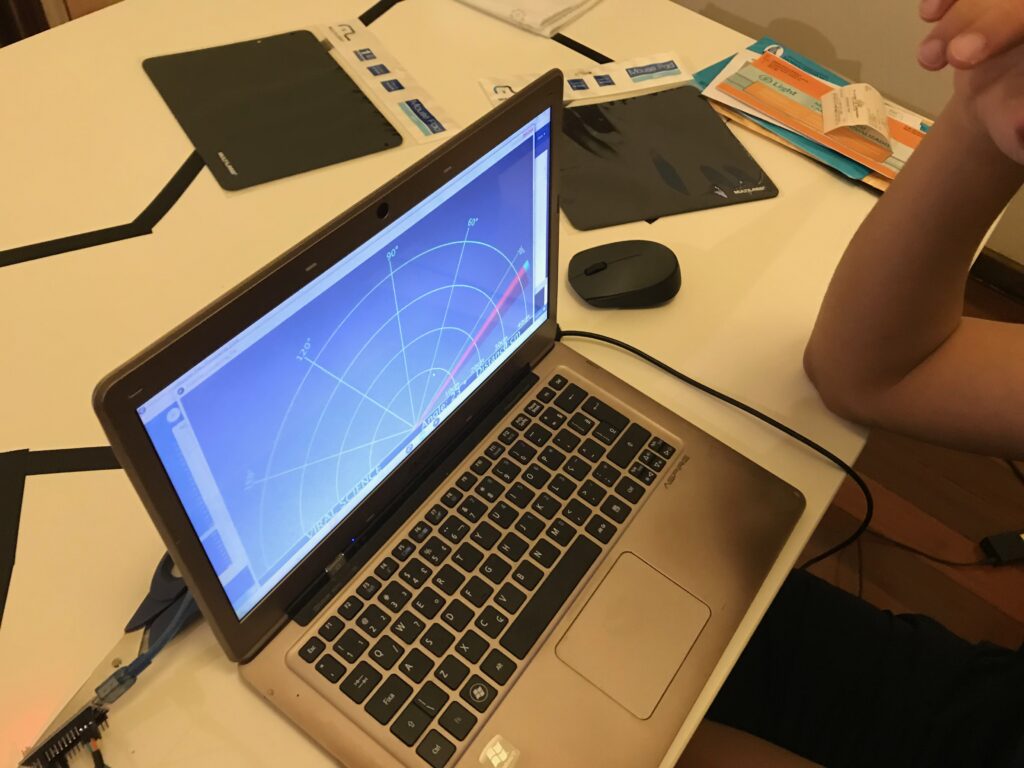
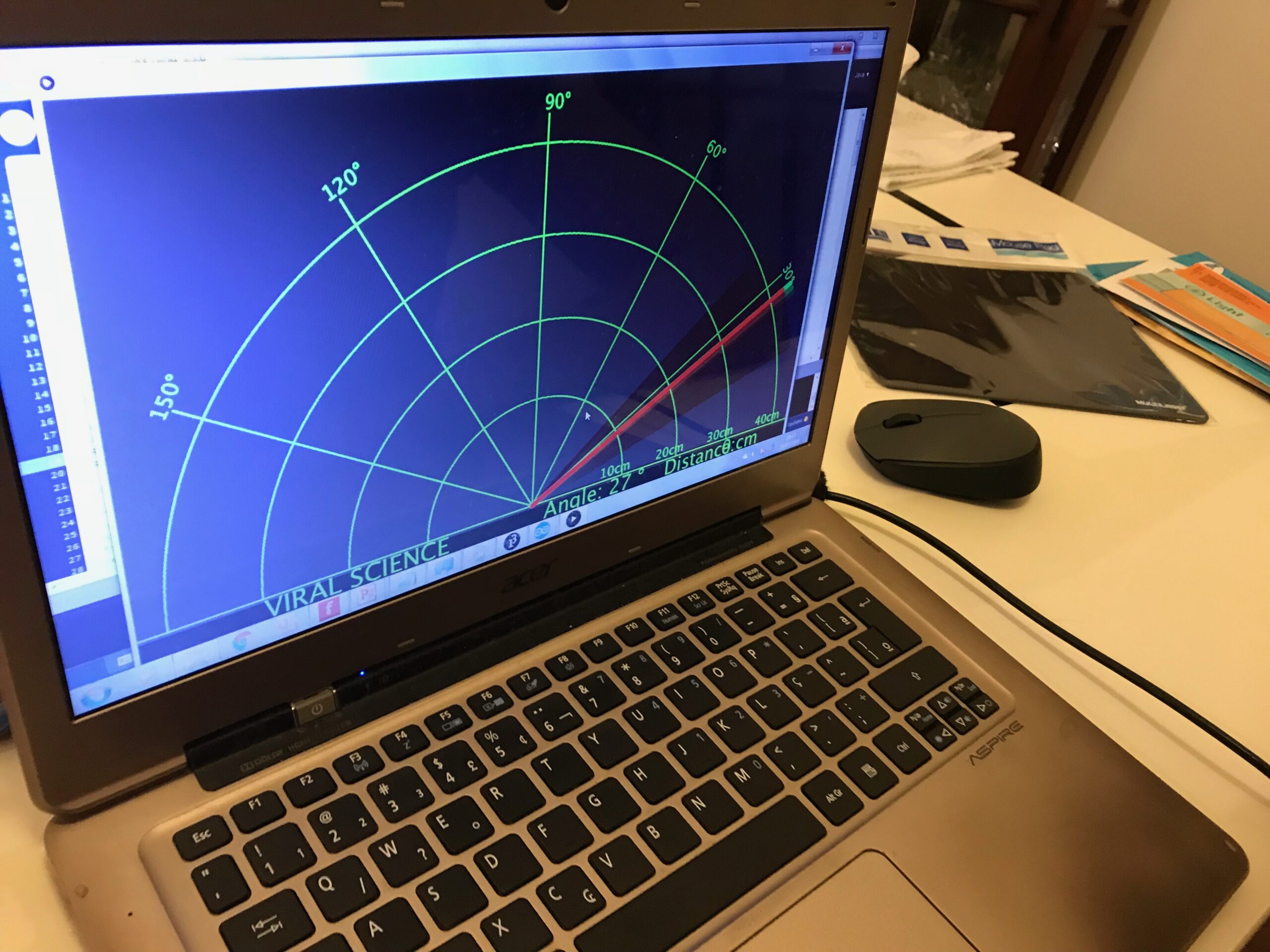
No primeiro protótipo, o gráfico do radar é feito em Processing, que se comunica com o Arduino através da porta serial. O Arduino informa o ângulo atual do servo motor e a distância medida pelo sensor. No programa, essas inforações são convertidas em um gráfico que identifica os obstáculos e mostra linhas vermelhas onde há obstáculos e a que distância estão do sensor. Além disso, é possível que um objeto ocupe mais de uma linha, podendo então ser calculado seu tamanho aroximado.
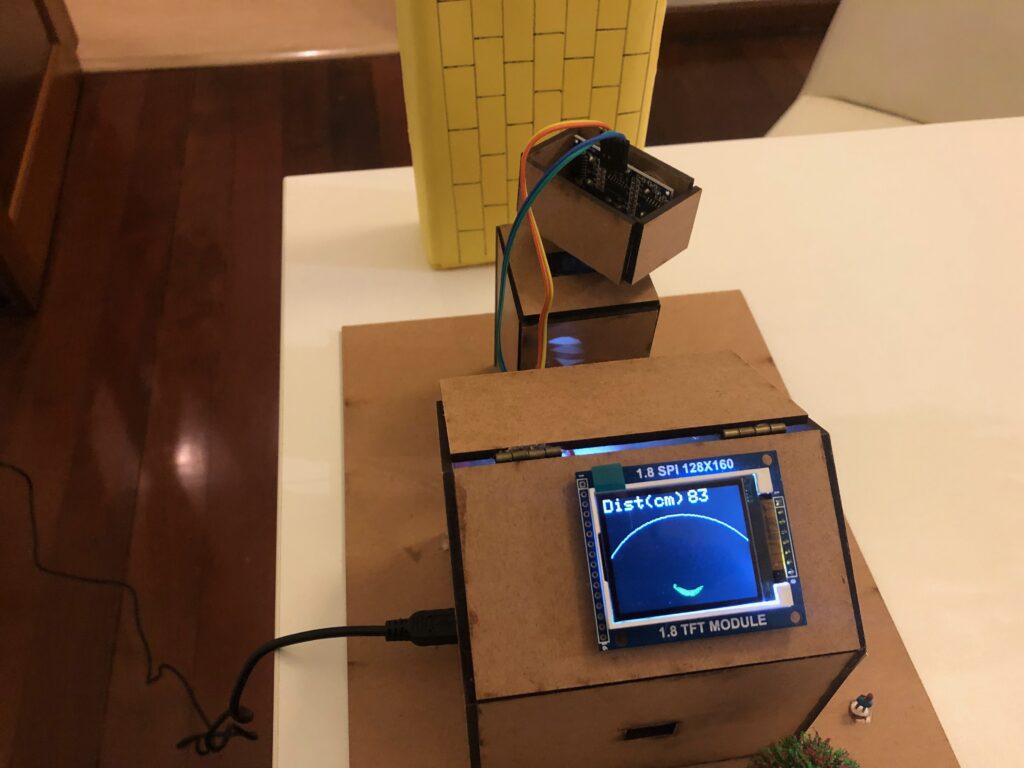
No segundo protótipo, colocamos um display TFT colorido para exibir a varredura, que funciona de maneira similar, mas sem a necessidade de um computador com Processing. Todos os cálculos, desde a distância obtida pelo sensor, o ângulo de rotação do servo motor e a exibição no display são feitas no próprio Arduino.
Caso tenha interesse, podemos compartilhar mais informações do projeto.